Synaptive Calibration Fixture
A calibration device is used to confirm the location of some part of an optically tracked instrument, usually the tip and sometimes the axis, for surgical navigation.
After calibration the instrument can be accurately tracked in space by a tracking camera. This fixture is used to calibrate the Synaptive Tracked Suction Instrument and the Synaptive Tracked Pointer Instruments
The challenge was holding a suction instrument, with various tube diameters, in the same position (i.e. so the axis of the tube is always in the same place with respect to the four reflective marker spheres, no matter the size of the tube). The situation was further complicated by the instrument’s tapered tubes, wherein the tip is smaller than the body. After many concepts the best solution was a pair of three-jaw mechanisms, much like a self-centering spring-actuated lens mount.
The fixture had to be simple to use, very accurate, and autoclave sterilisable.
All parts are machined. Most are titanium, a few are sterilisable plastic (PEEK).

Calibration Fixture

Calibration Fixture

Calibration Fixture

Calibration Fixture with Bottom Removed for Improved Sterilization


Calibration Fixture

Calibration Fixture Closed

Calibration Fixture Open
The fixture can securely hold and calibrate any instrument with a shaft 2 mm to 6 mm in diameter as long as it has a straight section at its distal end at least 50 mm long. The shaft does not have to have a constant diameter. Both pointer and suction instruments are tapered so the diameter at the tip is smaller.

Calibration Fixture with Suction Instrument

Calibration Fixture with Pointer Instrument
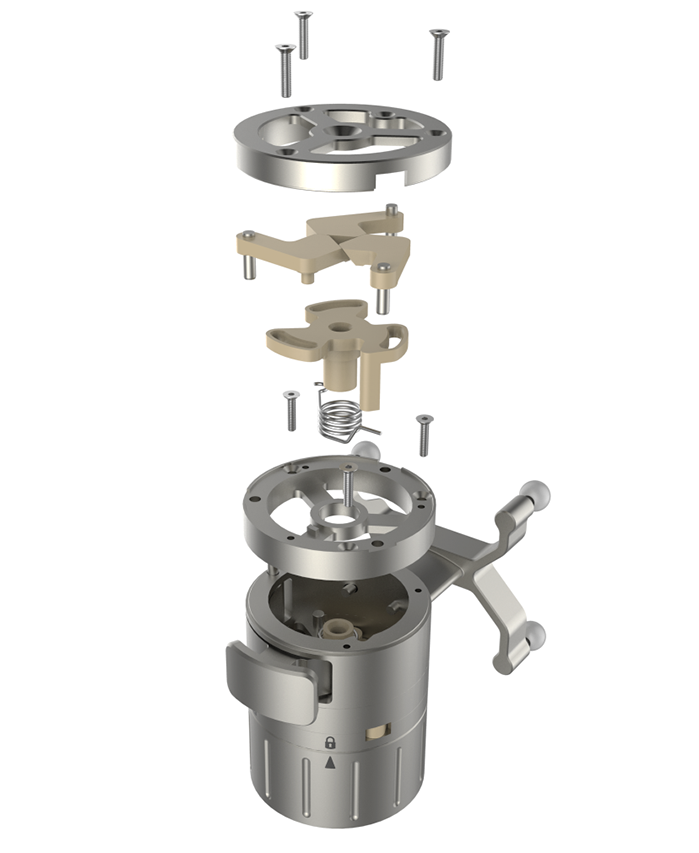
Exploded Assembly
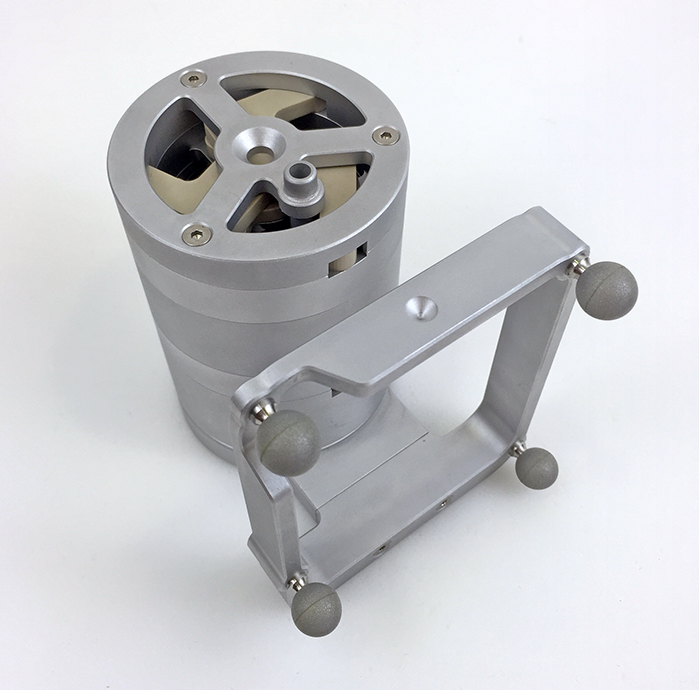
Aluminum Prototype Calibration Fixture
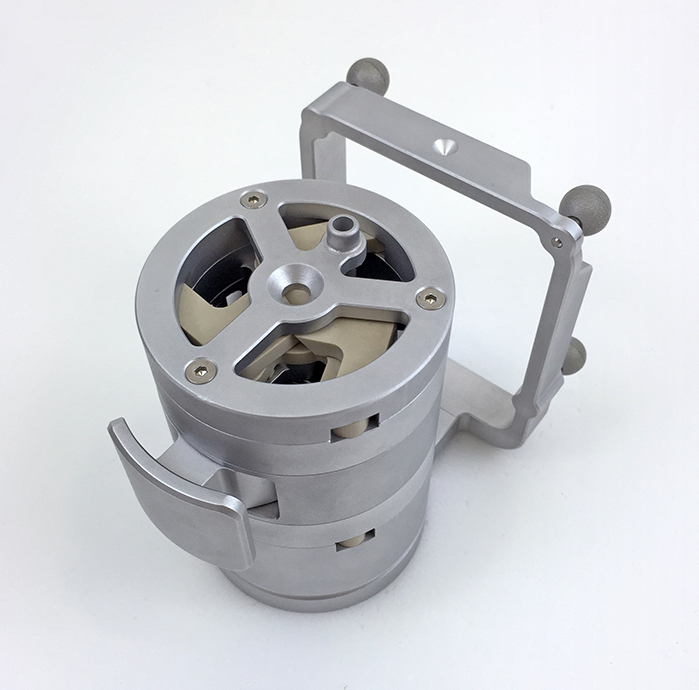
Aluminum Prototype Calibration Fixture
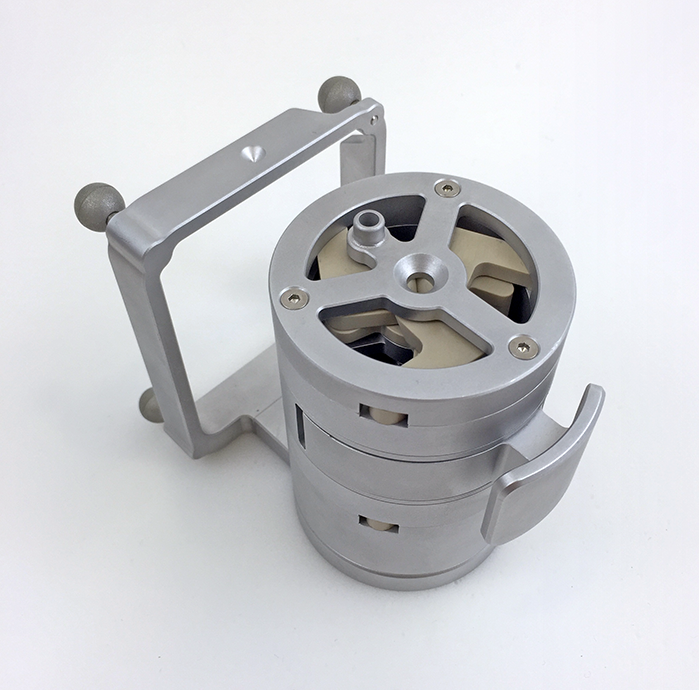
Aluminum Prototype Calibration Fixture
What is Navigation?
Navigation in a surgical context is a system of tracking a physical instrument in space and in a computer generated image at the same time. The computer image in Synaptive’s case is an MRI scan, which is three-dimensional. The physical instrument is represented in the image as a virtual instrument and movements of the two are synchronized. After a calibration step the virtual instrument moves in the exact same way as the physical instrument.
This can be achieved in several ways (active optical tracking and electromagnetic tracking, for example) but at Synaptive it was done with passive optical tracking. An array of three or four reflective spheres, attached to an instrument, is seen by a 3D tracking camera which translates movement in the physical world to corresponding movements in the computer image. This system makes it possible to register a patient’s MRI image to the patient. Once that’s done a surgeon can see and point to anatomy (using a tracked instrument) in the MRI image and the physical world at the same time. Structures visible in the MRI image are often hard to see in the physical world. Navigation gives a surgeon the ability to see inside the body in real-time.
