Synaptive Tracked Suction Instrument
Surgical suction instruments are tools used to remove fluids, tissue, and bone fragments during surgery.
Most suction instruments are not tracked but Synaptive’s clients, mostly neurosurgeons, requested a tracked suction instrument to improve navigated surgery workflow.
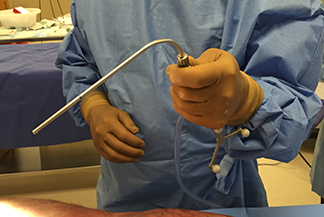
The instrument consists of three main parts: a handle, a tracking array, and a tube. The handle has two fittings; one is used to mount the tracking array, the other a flexible suction hose. The tracking array is a high-accuracy structure with three reflective marker spheres attached. Tubes come in a variety of lengths and diameters. They are semi-disposable meaning that they can be reused but eventually become damaged in use and have to be replaced.
This instrument was the ultimate result of two concepts that were fully developed, prototyped, and tested.

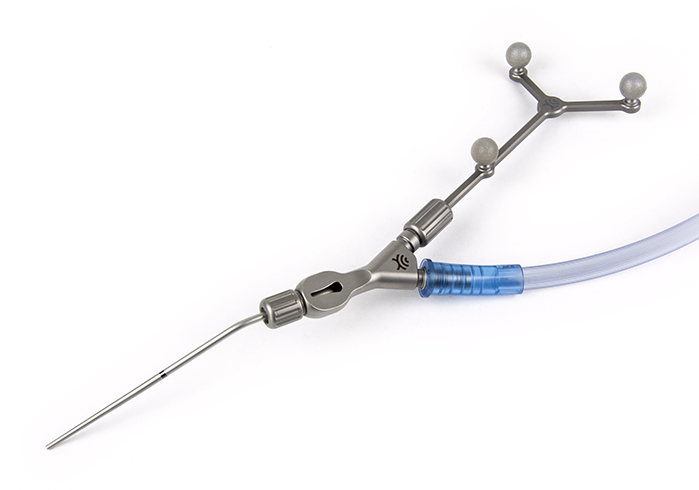
Optically Tracked Suction Instrument

Optically Tracked Suction Instrument

Optically Tracked Suction Instrument


Suction Instrument Components

Cranial Suction Tubes - 4, 6, 8, and 10 French
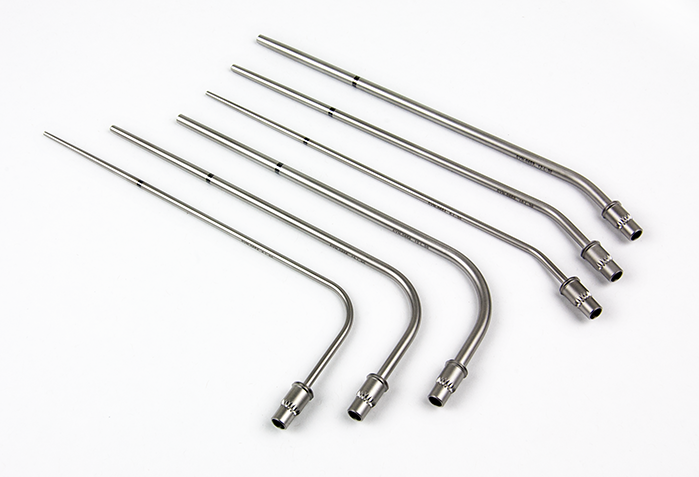
Spine Suction Tubes - 6, 8, and 10 French

Reference Array Fitting Detail

Reference Array Fitting Detail

Tube Fitting Detail

Tube Fitting Detail

Suction Sterilization Tray

Suction Sterilization Tray
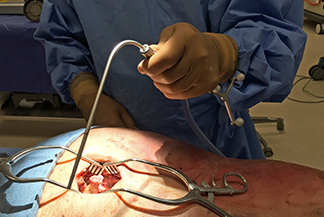
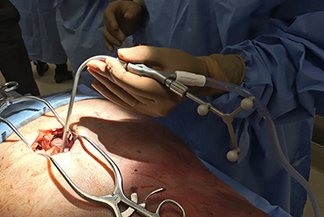
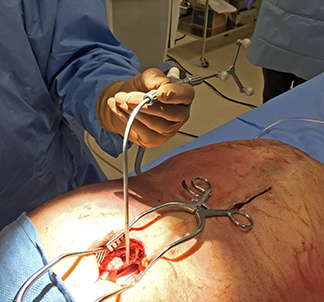
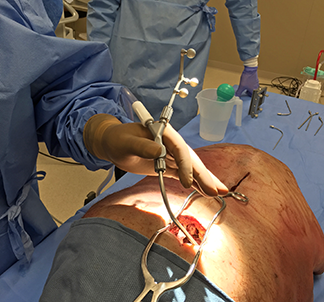
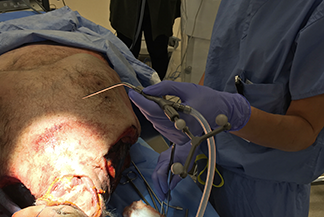
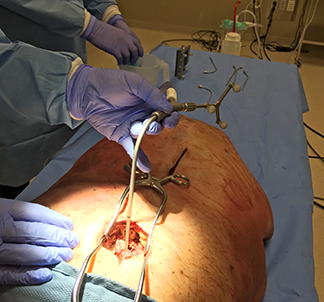
Usability testing was done in cadaver labs with actual surgeons to simulate a realistic environment as much as possible. These sessions generated valuable feedback from representative end users.
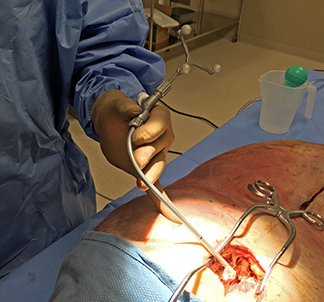
Usability Testing
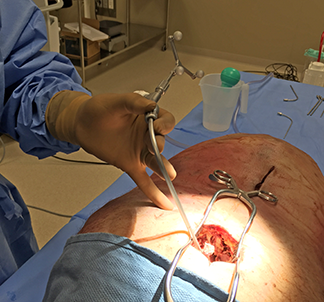
Usability Testing
Usability Testing
Usability Testing
Usability Testing
Usability Testing
Usability Testing
Usability Testing
Usability Testing

Usability Testing
What is Navigation?
Navigation in a surgical context is a system of tracking a physical instrument in space and in a computer generated image at the same time. The computer image in Synaptive’s case is an MRI scan, which is three-dimensional. The physical instrument is represented in the image as a virtual instrument and movements of the two are synchronized. After a calibration step the virtual instrument moves in the exact same way as the physical instrument.
This can be achieved in several ways (active optical tracking and electromagnetic tracking, for example) but at Synaptive it was done with passive optical tracking. An array of three or four reflective spheres, attached to an instrument, is seen by a 3D tracking camera which translates movement in the physical world to corresponding movements in the computer image. This system makes it possible to register a patient’s MRI image to the patient. Once that’s done a surgeon can see and point to anatomy (using a tracked instrument) in the MRI image and the physical world at the same time. Structures visible in the MRI image are often hard to see in the physical world. Navigation gives a surgeon the ability to see inside the body in real-time.
